综述
OpenGL 中的变换可以分为下面的三种: 即模型变换、投影变换、视口变换。 模型变换其实就相当于图形的几何变换,包括平移、缩放、旋转等操作,下面我们来详细研究一下 OpenGL 中三种操作的函数应用。
准备工作
在变换前我们首先要做一下准备工作,首先我们需要调用 glMatrixMode 函数来设置变换模式。 该方法介绍如下 glMatrixMode(Glenum mode),设置当前矩阵模式,它具有三个参数,分别为 GL_MODELVIEW,GL_PROJECTION,GL_TEXTURE。三个参数的含义为:
GL_MODELVIEW, 对模型视景矩阵堆栈应用随后的矩阵操作,也就是针对本节的模型几何变换设置的模式,本节所有内容均为此模式。 GL_PROJECTION, 对投影矩阵应用随后的矩阵操作,在投影变换中设置的模式。 GL_TEXTURE, 对纹理矩阵堆栈应用随后的矩阵操作,在设置动态纹理的过程中设置的模式。
所以,在本节我们就需要设置如下的模式
1 |
glMatrixMode(GL_MODELVIEW); |
接下来,我们需要设置
1 |
glLoadIdentity(); |
这个方法的作用是设置将当前的用户坐标系的原点移到了屏幕中心,类似于一个复位操作。 好,设置好以上两个条件之后我们就可以来进行变换啦。主要有以下三个函数:
1 |
glRotatef(angle,vx,vy,vz) //绕向量(vx,vy,vz)为轴旋转角度angle |
下面我们来详细说明这三个函数的用法。
平移
三种变换中,平移变换是最简单的。 类库中提供了下面两个方法:
glTranslated(GLdouble x,GLdouble y,GLdouble z) glTranslatef(GLfloat x,GLfloat y,GLfloat z)
这两种方法是基本是等价的,一种方法是传入 double 类型的参数,另一个是传入 float 类型的参数。 方法的作用是将物体分别沿 x,y,z 轴平移 x,y,z 的单位长度。 利用上一节的机器人我们来感受一下
1. 向右平移 100 像素
1 |
glTranslated(100,0,0); |
运行结果  可以看到,机器人向右平移了 100 像素
可以看到,机器人向右平移了 100 像素
2. 向左下分别平移 50,50 像素
1 |
glTranslated(-50,-50,0); |
运行结果  可以看到,机器人分别向左和向下平移了 50 像素
可以看到,机器人分别向左和向下平移了 50 像素
3. 向左下分别平移 50,50,向前平移 100
1 |
glTranslated(-50,-50,100); |
运行结果 哦,和上一个类似,也就是说在 z 轴上平移没有什么效果吗?难道因为我画的是二维平面图形?哦不,那不应该是距离我的视线更近了所以看到的更大了吗?好吧,事实好像不是这样的,我就姑且认为二维平面在 z 轴上的平移是没有影响的吧。 恩,这个函数基本用法就是这样,通过传入不同的 x,y,z 值实现平移即可。
旋转
旋转的方法有下面两个:
glRotatef(GLdouble angle,GLdouble x,GLdouble y,GLdouble z) glRotatef(GLfloat angle,GLfloat x,GLfloat y,GLfloat z)
其中第一个参数是旋转的角度,后面三个参数 x,yz 参数确立了旋转轴,旋转轴是原点 (0,0,0) 与 (x,y,z) 的连线。 下面我们用几个例子来感受一下
1. 绕 x 轴旋转 60 度
1 |
glRotated(60,10,0,0); |
运行结果  恩,它变扁了,旋转中心在机器人的中心,也就是中间的小红点,设想一下,绕 x 轴旋转 60 度,的确我们看到的应该就是变扁的机器人
恩,它变扁了,旋转中心在机器人的中心,也就是中间的小红点,设想一下,绕 x 轴旋转 60 度,的确我们看到的应该就是变扁的机器人
2. 绕 z 轴旋转 90 度
1 |
glRotated(90,0,0,10); |
 可以看到,机器人绕中心点旋转了 90 度,是逆时针方向。
可以看到,机器人绕中心点旋转了 90 度,是逆时针方向。
3. 旋转平移结合
感受完上面的两个例子之后,重头戏来了,上面的例子中旋转轴是 (0,0,0) 和 (x,y,z) 两点的连线,也就是旋转轴总是通过坐标原点的。 那如果我们要让物体绕特定的旋转轴来旋转,比如绕 (1,2,3) 和 (4,5,6) 来旋转怎么办? 这里就要用到平移和旋转的组合了。
如果旋转轴通过 (xp,yp,zp),而不通过坐标原点。假如旋转轴为 (xp,yp,zp) 和 (xq,yq,zq) 确立的。我们首先要将图形沿 x,y,z 方向分别平移 – xp,-yp,-zp,然后旋转参数 (x,y,z) 分别传入 (xq-xp,yq-yp,zq-zp) 三个值,旋转完毕之后再把图形沿 x,y,z 方向分别平移 xp,yp,zp 个单位长度即可。
在这里,我的教材和指导书中的内容又发生了冲突,教材中说的是先沿 x,y,z 方向分别平移 -xp,-yp,-zp,再沿 x,y,z 方向分别平移 xp,yp,zp 还原。而指导书中则是先沿 x,y,z 方向分别平移 xp,yp,zp,再沿 x,y,z 方向分别平移 -xp,-yp,-zp 还原,到底谁对谁错呢?我们来一个小例子验证一下。 如果觉得无聊,可以自行忽略下面小段内容。 为了直观地表示,我们统一设 z 坐标为 0,在 xy 平面中观察变换过程。 假设我们有一个点 (2,2,0),旋转的轴我们设为 (1,2,0) 和 (4,5,0) 的连线,那么该点绕轴旋转 180 度之后应该会是 (1,3,0),从图上可以很直观地看出 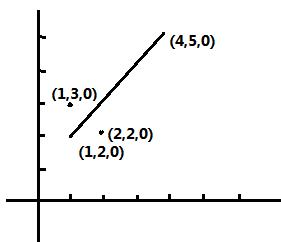 那么在调用类库的时候,我们首先就要对这个点进行平移,然后旋转,然后再反平移恢复。
那么在调用类库的时候,我们首先就要对这个点进行平移,然后旋转,然后再反平移恢复。
首先,我们按照第一种说法,即先沿 x,y,z 方向分别平移 – xp,-yp,-zp,即 (2,2,0) 减去 (1,2,0),变为了 (1,0,0),然后传入 (xq-xp,yq-yp,zq-zp) 实现绕 (0,0,0) 与 (xq-xp,yq-yp,zq-zp) 两点连线为旋转轴来旋转 180 度,显然是绕 (0,0,0) 与 (3,3,0) 的连线来旋转的,这个点变为了 (0,1,0),然后再沿 x,y,z 方向分别平移 xp,yp,zp 还原,即加 (1,2,0),即加得到的结果是 (1,3,0)。确实与图中点的符合,所以这一种说法验证正确。 另一种说法,即先沿 x,y,z 方向分别平移 xp,yp,zp,即 (2,2,0) 加上 (1,2,0),变为了 (3,4,0),然后传入 (xq-xp,yq-yp,zq-zp) 实现绕 (0,0,0) 与 (xq-xp,yq-yp,zq-zp) 两点连线为旋转轴来旋转 180 度,显然是绕 (0,0,0) 与 (3,3,0) 的连线来旋转的,这个点变为了 (4,3,0),然后再沿 x,y,z 方向分别平移 – xp,-yp,-zp 还原,即减去 (1,2,0),即加得到的结果是 (3,1,0)。与图中的点不符,所以这一种说法验证失败。
可见,我们得到的结果是
如果旋转轴通过 (xp,yp,zp),而不通过坐标原点。假如旋转轴为 (xp,yp,zp) 和 (xq,yq,zq) 确立的。我们首先要将图形沿 x,y,z 方向分别平移 – xp,-yp,-zp,然后旋转参数 (x,y,z) 分别传入 (xq-xp,yq-yp,zq-zp) 三个值,旋转完毕之后再把图形沿 x,y,z 方向分别平移 xp,yp,zp 个单位长度即可。
所以,我们要实现机器人绕两点 (10,20,30) 和 (40,50,60) 定义的轴线旋转 45 度,代码实现如下
1 |
glTranslatef(-10,-20,-30); |
运行结果 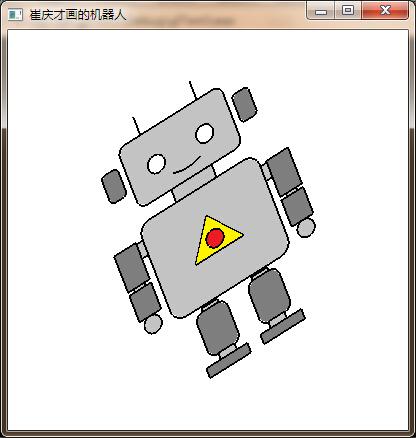 运行结果可能不太直观,可以直接参考代码实现
运行结果可能不太直观,可以直接参考代码实现
缩放
对于缩放,我们的方法也是有两个
glScaled(GLdouble x,GLdouble y,GLdouble z) glScalef(GLfloat x,GLfloat y,GLfloat z)
区别也就是一个参数为 double 类型,一个为 float 类型 函数的作用是将物体分别在 x,y,z 轴方向缩放为 x,y,z 倍,缩放中心为原点 下面我们来几个小例子感受一下
1. 沿 x 轴放大 2 倍
1 |
glScaled(2,1,1); |
运行结果  画面好美!
画面好美!
2. 沿 y 轴 z 轴分别放大 2 倍
1 |
glScaled(1,2,2); |
运行结果 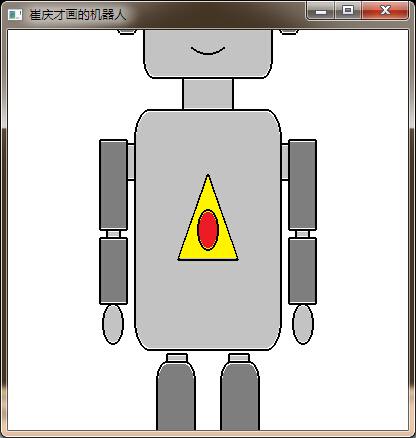 因为整个图形是一个平面图,所以我们只可以看出 z 轴放缩的效果
因为整个图形是一个平面图,所以我们只可以看出 z 轴放缩的效果
3. 放缩和平移的变换
和旋转的原理一样,默认的放缩中心是原点,在这里,如果我们的放缩中心如果不是原点,我们该怎样设置呢? 假设放缩中心为 (xp,yp,zp),方法如下:
如果我们的放缩中心设置为 (xp,yp,zp),而不是坐标原点。我们首先要将图形沿 x,y,z 方向分别平移 – xp,-yp,-zp,然后放缩参数 (x,y,z) 分别传入三个值代表放缩比例,放缩完毕之后再把图形沿 x,y,z 方向分别平移 xp,yp,zp 个单位长度还原。
下面,我们以 (50,50,50) 为放缩中心来对机器人的 xy 方向分别放缩 1.5 倍
1 |
glTranslated(-50,-50,0); |
运行结果  这样,我们就实现了以 (50,50,0) 为放缩原点来进行放大 1.5 倍的操作。
这样,我们就实现了以 (50,50,0) 为放缩原点来进行放大 1.5 倍的操作。
综述
在本篇我们描述了 OpenGL 中的平移旋转放缩变换操作,以及一些实例演示,希望对大家有帮助!
来源:https://cuiqingcai.com/1658.html